The behavior of rotating fluid is a ubiquitous phenomenon, arising in laboratory settings, and in geophysical and astrophysical applications. The Taylor-Proudman theorem suggests that steady, rotating flows tend to be planar. An interesting question is how does the planar flow become three dimensional? A common mechanism for the bifurcation from a planar to a fully three dimensional flow is the elliptical instability [Ker02]. Elliptical instability refers to the instability mechanism by which three dimensional flows are generated from planar flows with elliptical streamlines. The linear problem has been studied extensively in earlier work [Bay86,Ioo95,IMD90]. Our goal is to understand the possible types of nonlinear behavior that result near the bifurcation points.
We consider a rotating, inviscid, incompressible fluid in a triaxial
ellipsoid
![]() +
+ ![]() +
+ ![]()
![]() 1. This system satisfies the Euler
equation
1. This system satisfies the Euler
equation
There are two dimensionless parameters in this problem,
 ,
,  .
.
The system naturally inherits the 3 symmetries of the domain, which are the 3 reflections across each of the coordinate planes. Using these 3 basic symmetries, we can decompose vector functions into 8 symmetry classes in very much the same way a scalar function can be written as a sum of its even and odd parts. Two of these reflections map v0 to - v0. These yield the reversing operators of the system. The remaining reflection across the x1x2 plane preserves v0. This gives the symmetry operator of the system.
Composing the 3 reflections, we get 8 = 23 involutions consisting of 4 symmetries and 4 reversing symmetries. We exploit these symmetries and reversing symmetries in our analysis of the stability of the base flow v0.
The PDE for the velocity field
v is an infinite
dimensional dynamical system. Picking an appropriate basis for vector
fields in the ellipsoid, and then using a Galerkin truncation yields a
finite dimensional system of ODEs. As shown in
[GP92,Leb89], we can choose a polynomial basis for
the vector fields, such that every basis vector
lies entirely in one of the 8 symmetry classes. Consequently, the
truncated system inherits the 4 symmetries and the 4 reversing
symmetries of the full system, and these involutions R are given by
diagonal matrices all of whose entries are ![]() 1.
1.
In Ref. [LS99], this truncated system is analyzed directly by handling dynamical systems of large dimension. It would be useful to reduce the size of the system. A standard method is to employ the center manifold reduction which reduces the full system to one whose linear part has only eigenvalues with zero real parts. However, this reduction is not possible in our case, since reversibility implies that if the base flow is not unstable, the entire system is already on a center manifold. Nonetheless, only linearized modes whose frequencies are in resonance grow when parameters cross critical values [Ker02]. This suggests restricting our attention to the subspace spanned by the resonant modes to analyze the onset of instabilities. In most cases, we verified that inclusion of non-resonant modes does not alter the basic character of the bifurcation to instability.
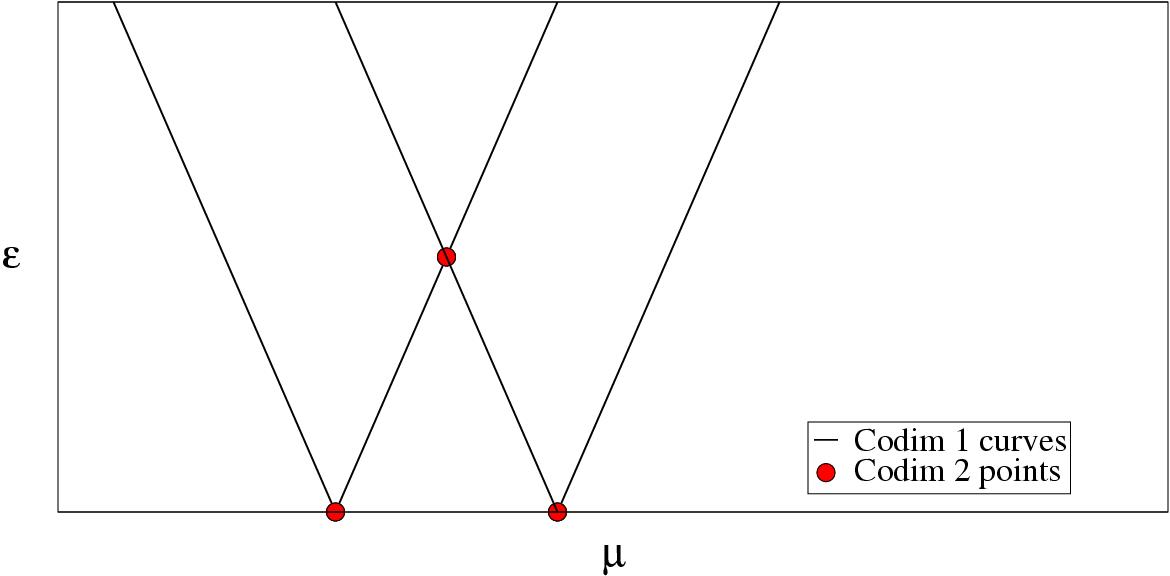
Since we have two parameters in our problem, we are only interested in
codimension one and two bifurcations. We first determine the codimension one
bifurcation curves and the codimension two bifurcation points for the
truncated system in the ![]() -
-![]() plane, by
analyzing the eigenvalues of the linearized operator L. The unstable
regions in the
plane, by
analyzing the eigenvalues of the linearized operator L. The unstable
regions in the ![]() -
-![]() plane consists of wedges bounded by
pairs of codimension one curves that emerge from codimension two
points (fig 1).
plane consists of wedges bounded by
pairs of codimension one curves that emerge from codimension two
points (fig 1).
We then determine the relevant coefficients for the general normal forms at each of the codimension two points. Using this information, we determine the nature of the bifurcation at the codimension two points and along the pairs of codimension one curves that emanate from these points, at least in the vicinity of these codimension two points.
Lastly, we verify the theoretical predictions by direct numerical simulation of the truncated system, and by comparison with experiments where possible.